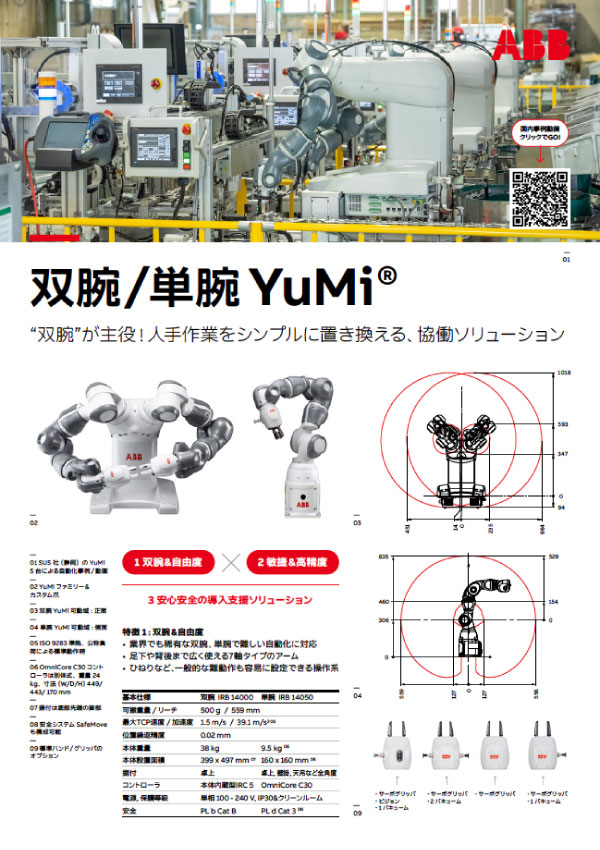
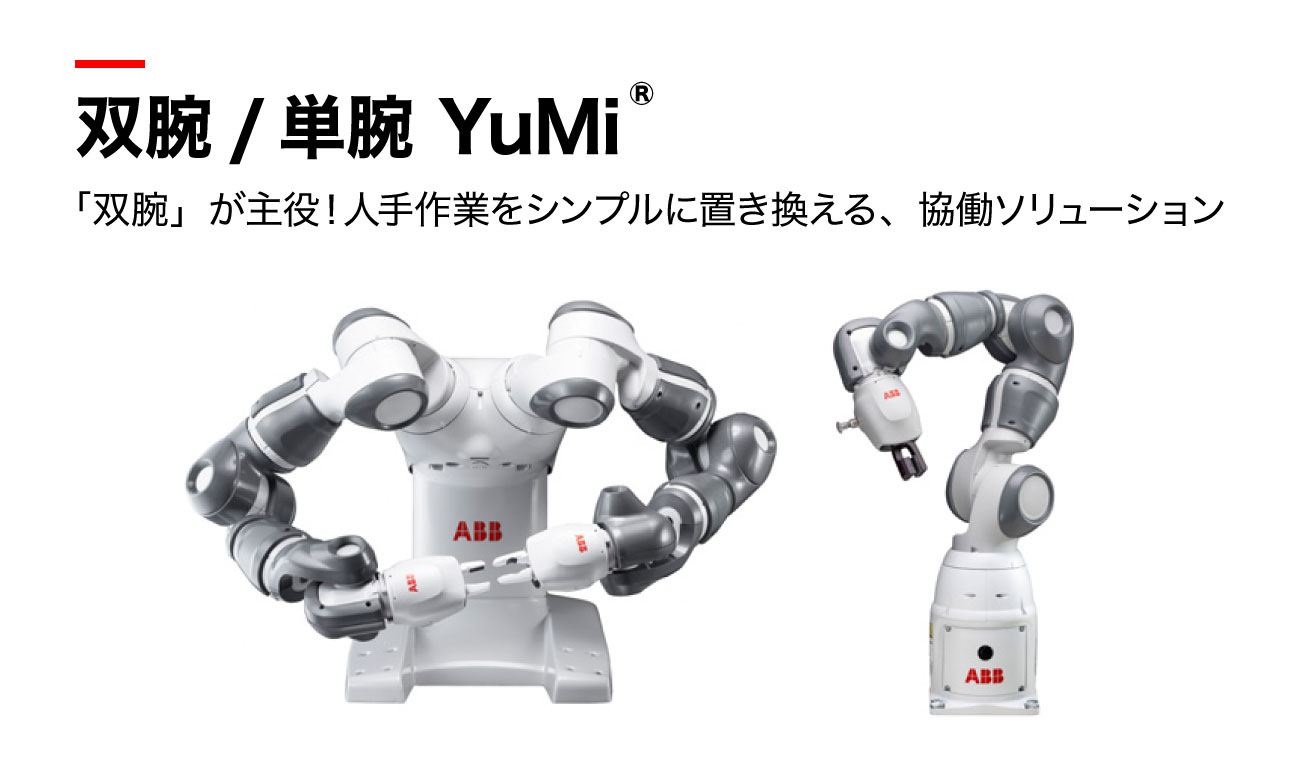
協働型双腕ロボット ABB YuMi(IRB 14000)
この記事はABB株式会社で取り扱う製品の情報です。
ABBのYuMiロボットは、小型部品の組立作業で作業者を支援するために2015年に発売されて以来、世界中の生産ラインで生産性と品質を向上させるために重要な役割を果たしてきました。
人間工学的なデザインと、ピンチポイントを避けるためのソフトパッドを備えた軽量マグネシウム合金アーム、衝突検出を伴う高度な動作制御を含む一連の安全機能により、YuMiは、人と隣り合ってワークステーションに設置されるように設計され、以前は安全柵またはケージを必要としたであろうタスクを人とロボットが一緒に作業することを可能にすることによって、柔軟性を増加させています。
YuMiは、一緒に働く人とぶつかるなど、予期せぬ衝撃を感知した場合、数ミリ秒以内に動作を一時停止でき、リモコンの再生ボタンを押すような感覚で容易に再開できます。コンパクトなボディで標準的な人間用のワークステーション以上のスペースを必要としません。リードスループログラミングに対応し、オペレーター向けの特別なトレーニングは不要です。
YuMiが提供するベネフィット
双腕YuMiは単腕型では難しい自動化を実現することができます。例えば、部品の高精度な組付けやマテハン、さらにはОリングの組付けやゴムパッキンの組付けなど人が両手を使って行う作業の自動化に役立ちます。
また、単腕型では治具や周辺装置が複雑になる自動化に対してもよりシンプルな設備仕様で対応できるため、トータル費用の削減だけでなく、段取り替えや設計変更への対応を容易にします。
主な特長
同クラス協働ロボットで最も「器用」といっても過言ではない14軸の動作性能を有しています。
双腕&自由度

図1.双腕14軸だからできる自由度の高い動作
※画像をクリックすると、大きな画像が表示されます。
- 業界でも稀有な双腕、単腕で難しい自動化に対応
- 足下や背後まで広く使える7軸タイプのアーム
- ひねりなど、一般的な難動作も容易に設定できる操作系
敏捷&高精度
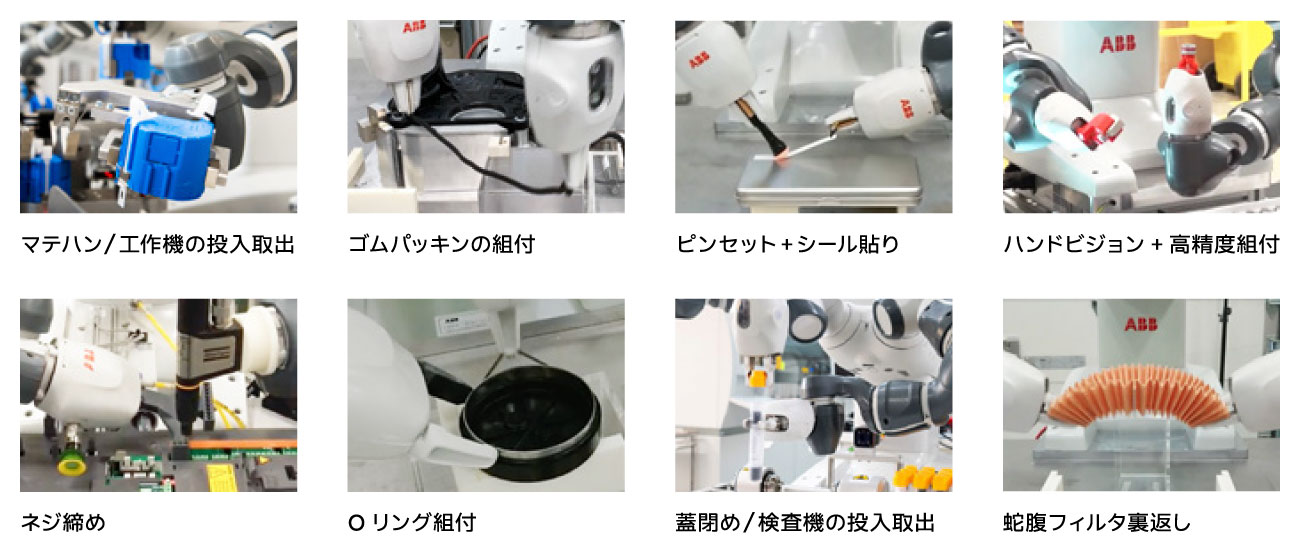
図2.YuMiの活用事例
※画像をクリックすると、大きな画像が表示されます。
- 250g未満の軽量物のハンドリングに特化することで、最大限の安全性※と、素早く高精度な動作を両立
- 例えば、0.05mm精度の金属部品組付など、人手ではコツや迷いが生じる作業でも生産性を大幅アップ
- 必ずリスクアセスメントを実施してください。
安心安全の導入支援ソリューション

図3.シミュレーション・事前最適化の事例
※画像をクリックすると、大きな画像が表示されます。
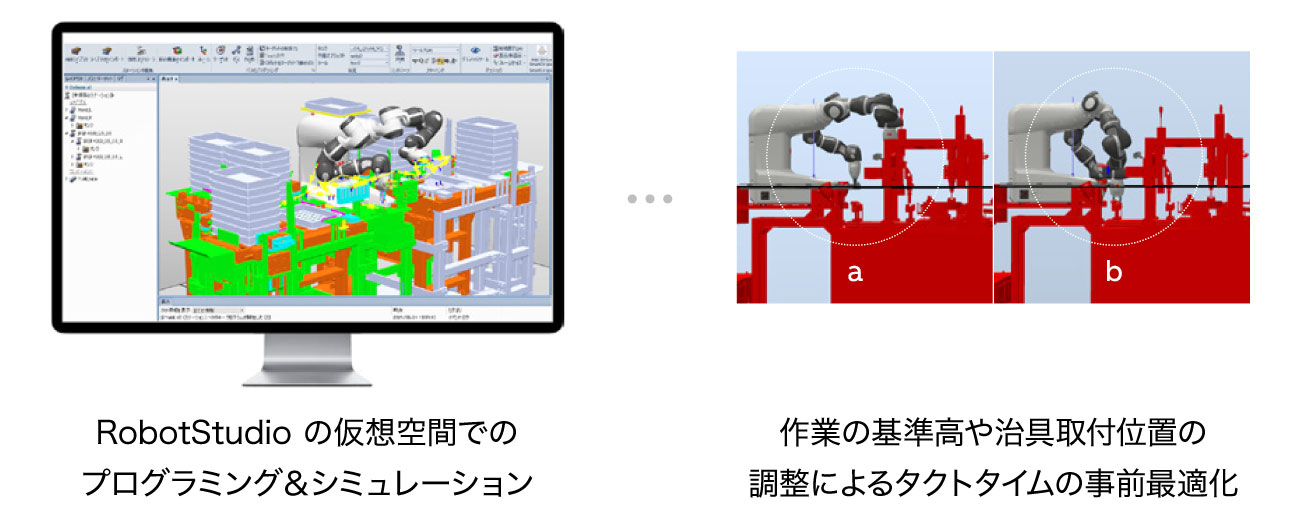
図4.確実な投資対効果を得るための3つのステップ
※画像をクリックすると、大きな画像が表示されます。
- シミュレーション、実機検証施設、ノウハウを活かし、エキスパートが課題解決に伴走、投資対効果を確実に
- 仮想ロボットコントローラ技術が高精度検証のカギ
- 「難しそう」で終わらせないために。作り込んだ動画やプログラムなど、そのままお渡し可能
主な仕様
基本仕様
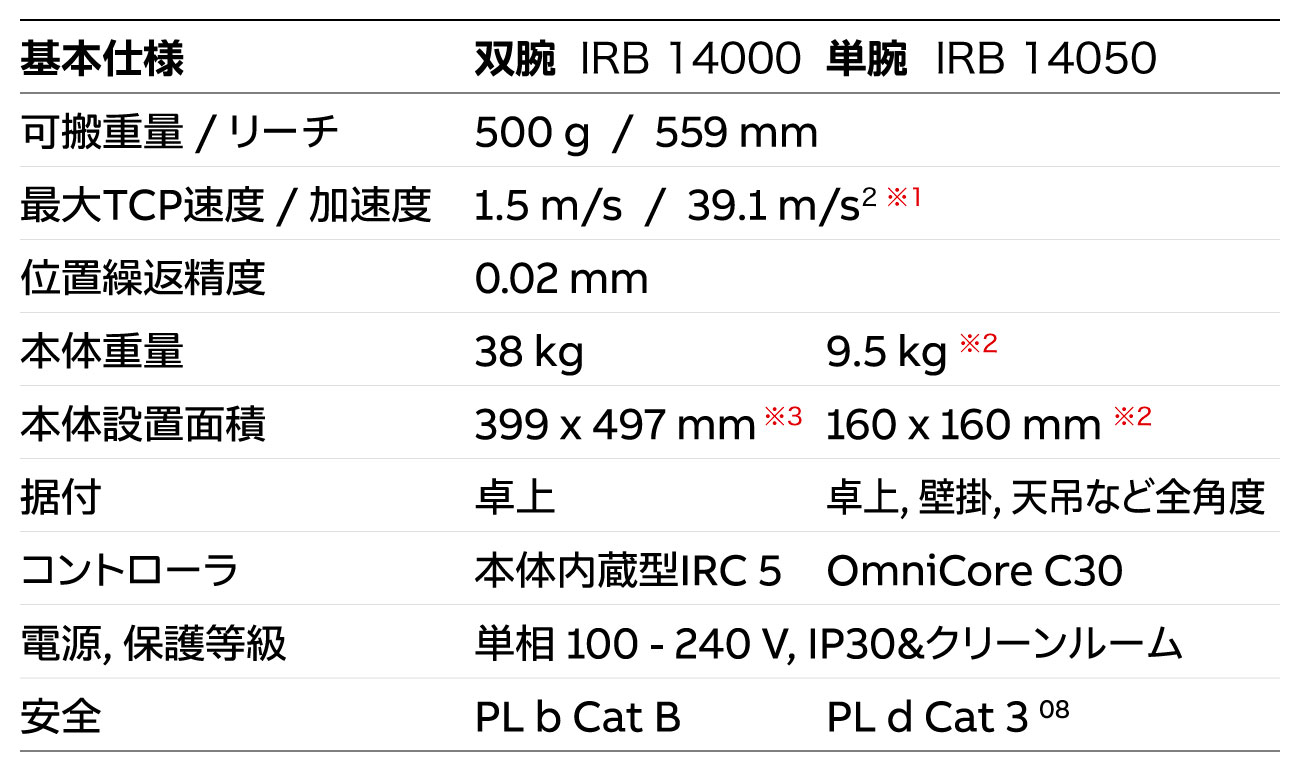
表1.IRB 14000基本仕様
※画像をクリックすると、大きな画像が表示されます。
- ISO 9283 準拠、公称負荷による標準動作時
- OmniCore C30 コントローラは別体式、重量24kg、寸法(W×H×D) 449×170×443 mm
- 据付は底部先端の脚部
可動域
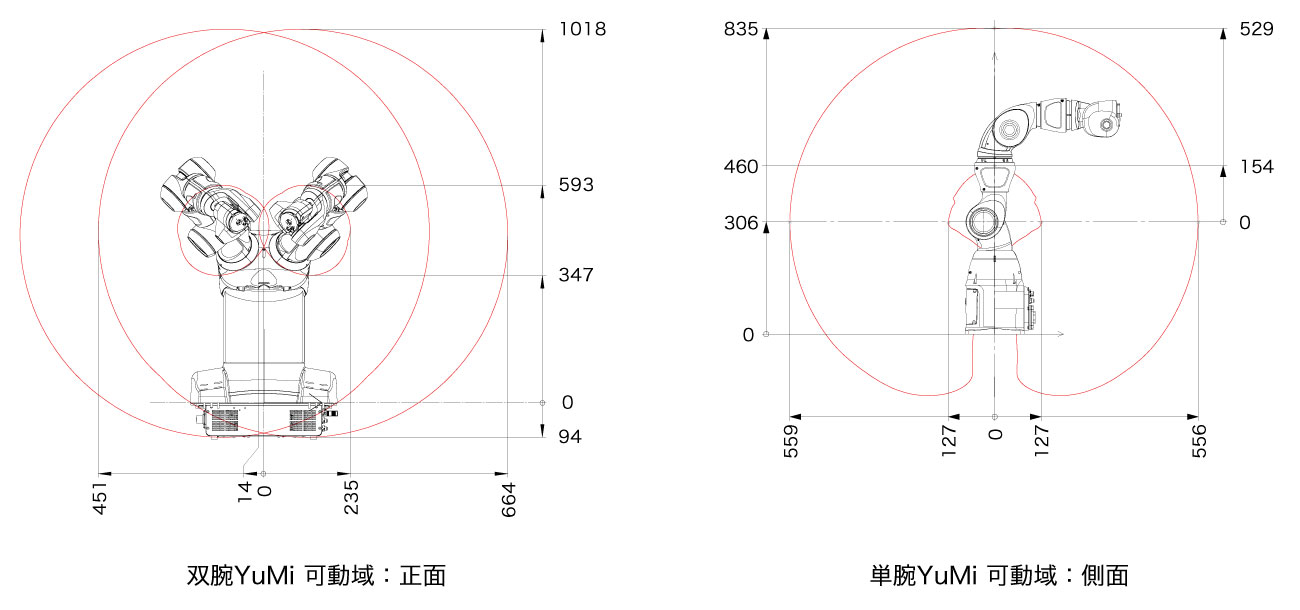
図5.YuMiの可動域
※画像をクリックすると、大きな画像が表示されます。
標準ハンド/グリッパのオプション

標準ハンド/グリッパの オプション
※画像をクリックすると、大きな画像が表示されます。
関連リンク
- ABB 協働型双腕ロボット Yumi紹介ページ(new.abb.com)
ABB 協働型双腕ロボット YuMiリーフレット